Marty Core header providing access to Marty methods. More...
#include <deque>#include <fstream>#include <sstream>#include <ros/ros.h>#include <ros/package.h>#include <tf2_ros/transform_broadcaster.h>#include <tf2_ros/transform_listener.h>#include <tf2/LinearMath/Quaternion.h>#include <tf2_geometry_msgs/tf2_geometry_msgs.h>#include <std_msgs/Bool.h>#include <std_msgs/String.h>#include <std_msgs/Float32.h>#include <std_srvs/SetBool.h>#include <sensor_msgs/JointState.h>#include <nav_msgs/Odometry.h>#include <marty_msgs/Accelerometer.h>#include <marty_msgs/GPIOs.h>#include <marty_msgs/MotorCurrents.h>#include <marty_msgs/Output.h>#include <marty_msgs/ServoMsg.h>#include <marty_msgs/ServoMsgArray.h>#include <marty_msgs/GPIOConfig.h>#include <marty_msgs/Sound.h>#include <marty_msgs/SoundArray.h>#include <marty_msgs/Keyframe.h>#include <marty_msgs/KeyframeArray.h>#include <geometry_msgs/TransformStamped.h>#include <ros_marty/definitions.hpp>
Include dependency graph for marty_core.hpp:

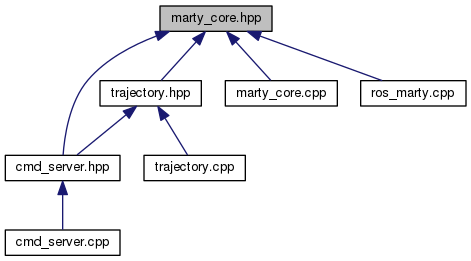
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | MartyCore |
| struct | robotJoint |
Detailed Description
Marty Core header providing access to Marty methods.
- Date
- 2016-02-06
- Copyright
- (Apache) 2016 Robotical Ltd.
Definition in file marty_core.hpp.